導(dǎo)電水凝膠在柔性傳感器領(lǐng)域顯示出良好的應(yīng)用前景,但其往往存在機(jī)械性能差、靈敏度低、缺乏抗凍性等問題。在此,作者報告了一種堅韌、高靈敏度和防凍應(yīng)變傳感器,該傳感器由雙交聯(lián)聚丙烯酰胺和聚乙烯醇(PVA)網(wǎng)絡(luò)組成的導(dǎo)電有機(jī)水凝膠,以及作為納米填料的MXene納米片和作為主要導(dǎo)電組分的聚(3,4-亞乙基二氧噻吩)摻雜的聚(苯乙烯磺酸鹽)(PEDOT/PSS)組裝而成(PPMP-OH有機(jī)水凝膠)。由于 MXene 納米片的機(jī)械增強(qiáng)以及有機(jī)水凝膠中形成的各種強(qiáng)非共價相互作用,MXene 納米片大大提高了 PPMP-OH 的拉伸強(qiáng)度和韌性。 PPM1P-OH有機(jī)水凝膠在772%時的拉伸強(qiáng)度為1.48 MPa,韌性為5.59 MJ/m
3。此外,PEDOT/PSS 顯著提高了 PPMP-OH 的電導(dǎo)率和應(yīng)變傳感性能,PEDOT/PSS 可以與 PVA 形成氫鍵,并與 MXene 形成靜電相互作用。這對于構(gòu)建均勻分布且穩(wěn)定的3D導(dǎo)電網(wǎng)絡(luò)非常有利于獲得PPMP-OH的應(yīng)變依賴性電阻。由PPMP1-OH組裝而成的應(yīng)變傳感器具有5.16的高靈敏度、高達(dá)500%的可檢測應(yīng)變范圍和122 ms的短響應(yīng)時間,能夠有效地檢測人體的各種生理活動,并且穩(wěn)定性高。此外,相應(yīng)的壓力傳感器陣列在識別壓力大小和位置方面也表現(xiàn)出高靈敏度。

Fig 1. (a) 超薄 Ti3C2 納米片的制備示意圖。 (b) PPMPOH有機(jī)水凝膠的制備過程示意圖。 (c) Ti3AlC2 MAX 和 Ti3C2Tx MXene 的 XRD 圖案。 (d) 分層 MXene 納米片的 TEM 圖像。 (e) PAM、PAM-PVA、PPM 和 PPMP 水凝膠的 FTIR 光譜。 (f) 凍干 PPMP 水凝膠的截面 SEM 圖像和 EDS 光譜。
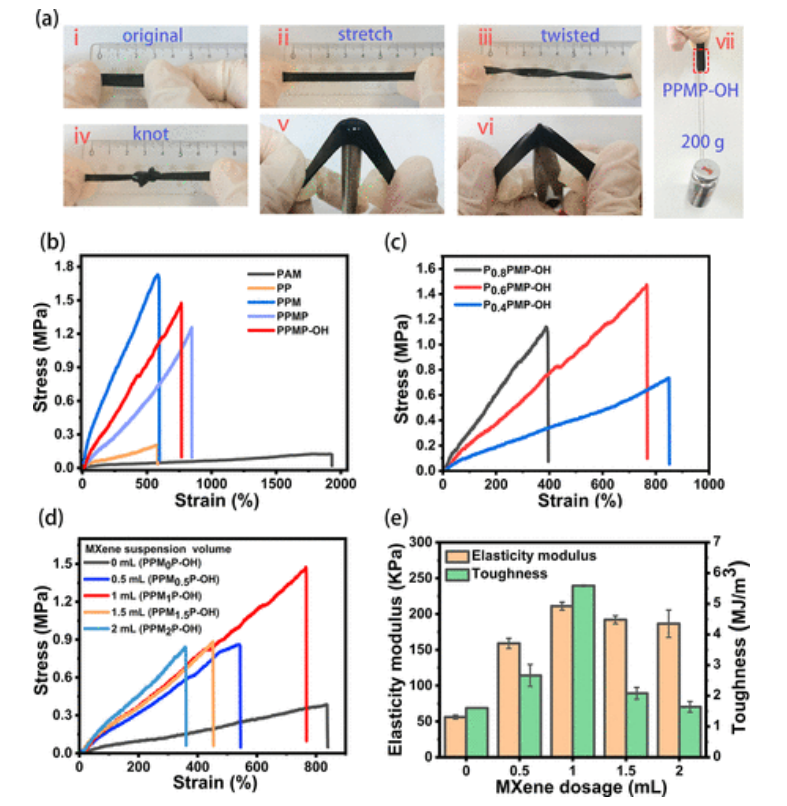
Fig 2. (a) PPMP-OH 有機(jī)水凝膠的照片:(i) 初始狀態(tài),(ii) 拉伸,(iii) 扭曲,(iv) 打結(jié)后拉伸。 PPMP-OH 有機(jī)水凝膠承受金屬圓柱體 (v) 和剪刀 (vi) 的壓力。 (vii) 200克重物可以輕松舉起。 (b) 不同組成的水凝膠或有機(jī)水凝膠的拉伸應(yīng)力-應(yīng)變曲線。具有不同 PVA (c) 和 MXene (d) 含量的 PPMP-OH 有機(jī)水凝膠的拉伸應(yīng)力-應(yīng)變曲線。 (e) 不同MXene含量的PPMP-OH有機(jī)水凝膠的彈性模量和韌性。
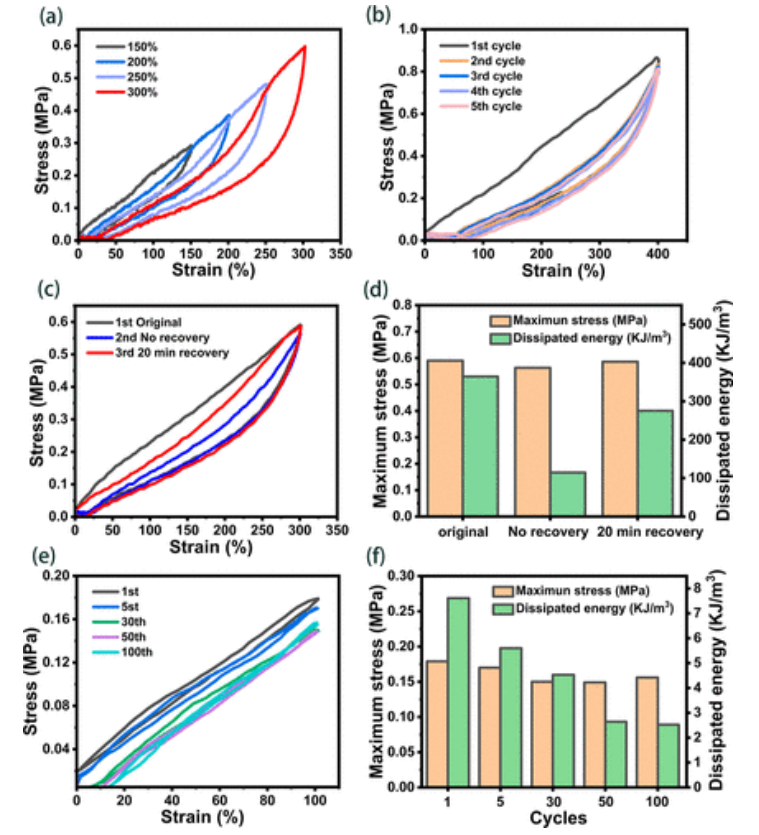
Fig 3. (a) 不同應(yīng)變下 PPM1P-OH 有機(jī)水凝膠的連續(xù)加載-卸載。 (b) 五個加載-卸載循環(huán),兩次連續(xù)測試之間沒有休息間隔。 (c) 具有不同休息時間的 300% 應(yīng)變的拉伸循環(huán)應(yīng)力-應(yīng)變曲線。 (d) (c) 中每個循環(huán)的最大應(yīng)力和耗散能量。 (e) 100% 拉伸應(yīng)變下 100 個循環(huán)。 (f) (e) 中循環(huán)的最大應(yīng)力和耗散能量。

Fig 4. (a) PPMP 水凝膠和 PPMP-OH 有機(jī)水凝膠在 -20 °C 冷凍 12 小時后的數(shù)碼照片。 (b) 冷凍 PPMP-OH 有機(jī)水凝膠和 LED 燈串聯(lián)的電路。 (i) 正常狀態(tài)。 (ii) 拉伸狀態(tài)。 (c) 正常和冷凍 PPMP-OH 有機(jī)水凝膠的典型應(yīng)力應(yīng)變曲線。不同溶劑交換時間下 PPMP-OH 有機(jī)水凝膠的應(yīng)力應(yīng)變曲線 (d) 和電導(dǎo)率 (e)。 (f) PPMP水凝膠和PPMP-OH有機(jī)水凝膠在室溫下儲存7天的相對重量變化。
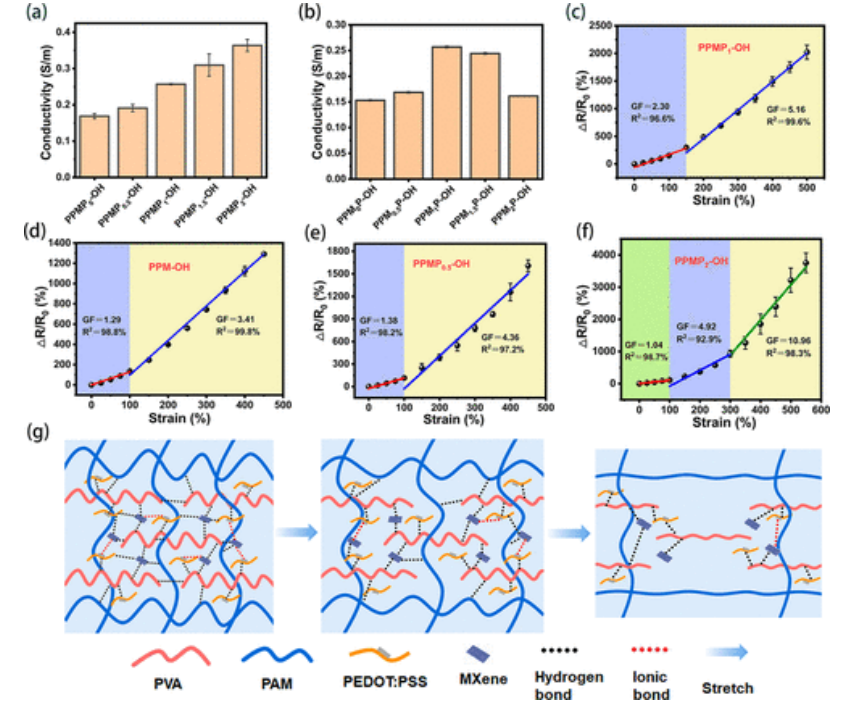
Fig 5. (a) 不同PEDOT/PSS含量的PPMP-OH的電導(dǎo)率。 (b) 不同 MXene 含量的 PPMP-OH 的電導(dǎo)率。有機(jī)水凝膠的應(yīng)變傳感性能。 (c) PPMP-OH 有機(jī)水凝膠的 ΔR/R0 隨拉伸應(yīng)變的變化。 PEDOT/PSS含量分別為0 (d)、0.5 (e)和2 mL (f)的PPMP-OH有機(jī)水凝膠的傳感特性 (g) PPMP-OH應(yīng)變傳感器在拉伸下的變形機(jī)制。

Fig 6. (a) PPMP 水凝膠在 30% 應(yīng)變下的響應(yīng)時間和恢復(fù)時間。 (b) PPM-OH水凝膠柔性應(yīng)變傳感器在不同應(yīng)變下的相對電阻變化。不同拉伸速率下ΔR/R0的變化[部分(c)和不同應(yīng)變(d)]。 (e) 逐步伸長和釋放過程中ΔR/R0隨時間的變化。 (f) 50%應(yīng)變下重復(fù)加載-卸載過程400個循環(huán)下的ΔR/R0響應(yīng)。 (g)我們的PPMP-OH有機(jī)水凝膠與其他報道的水凝膠或有機(jī)水凝膠之間的綜合性能比較。
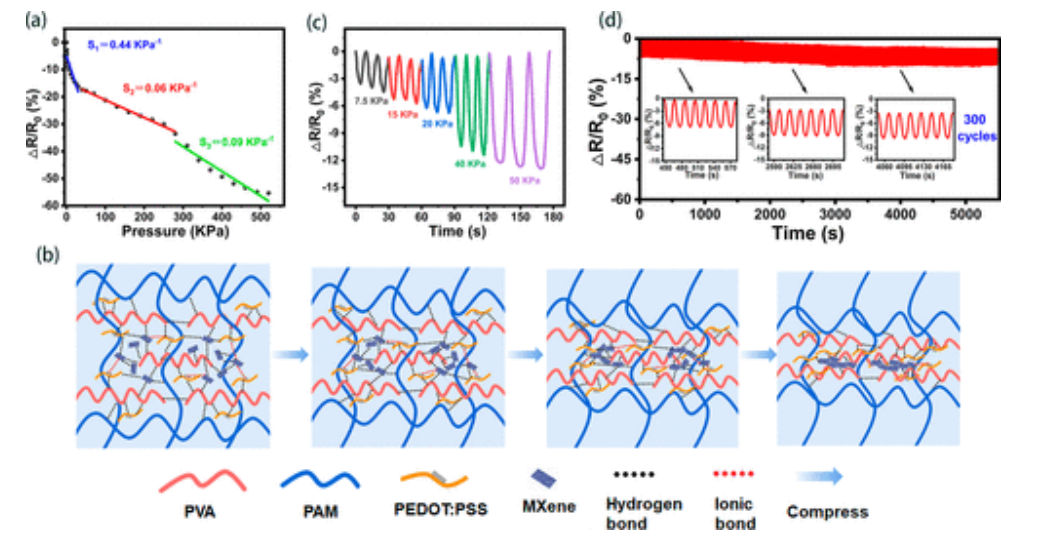
Fig 7. (a) PPMP-OH基壓力傳感器在不同壓力下的相對電阻變化。 (b) 壓力傳感器在不同壓力下重復(fù)3次的相對電阻變化。 (c) 10% 壓縮下 300 個加載-卸載循環(huán)。 (d) PPMP-OH壓力傳感器在壓力下的變形機(jī)制。

Fig 8. PPMP-OH 應(yīng)變傳感器在監(jiān)測人體運(yùn)動和壓力方面的性能。 (a) 食指彎曲和伸直不同角度的ΔR/R0信號。手指彎曲(b)、握拳動作(c)、手腕彎曲(d)和行走(e)等人體關(guān)節(jié)運(yùn)動的反應(yīng),以及頭部運(yùn)動(f)和咳嗽(g)分別引起的頸部肌肉運(yùn)動。壓力傳感器響應(yīng)手指敲擊 (h) 和 10 g 重量 (i) 的壓力的 ΔR/R0 比率。

Fig 9. (a) 4 × 5 單元傳感器陣列上 50 g 重物的照片和 (b,c) 相應(yīng)的壓力分布。 (d) 手指按壓和相對電阻變化 (e,f)。 (g) 手掌按壓和相對阻力變化 (h,i)。來自傳感響應(yīng)的 (b,e,h) 2D 映射和 (c,f,i) 3D 映射。
相關(guān)研究工作由浙江理工大學(xué)Lie Wang和Sanqing Huang課題組由于2024年在線發(fā)表在《ACS Appl. Mater. Interfaces》期刊上,ough and Strain-Sensitive Organohydrogels Based on MXene and PEDOT/PSS and Their Effects on Mechanical Properties and Strain-Sensing Performance,原文鏈接:
https://doi.org/10.1021/acsami.3c18631
轉(zhuǎn)自《石墨烯研究》公眾號